|
Function |
Description |
|
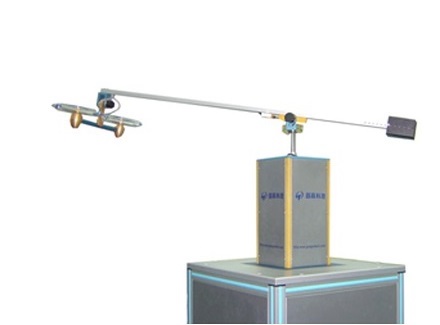
Pitch angle |
-150° ~ 150° |
|
Roll angle |
-150° ~ 150° |
|
Yaw angle |
0° ~ 360° |
|
Power input |
AC220V, 50HZ, 2A |
|
Motion controller |
GT-400-SV-PCI |
|
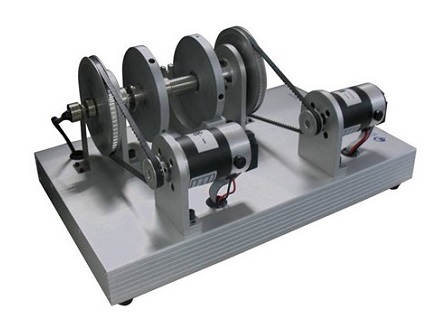
DC motor |
24V 5000RPM |
|
Pitch encoder |
1000P/R |
|
Roll encoder |
1000P/R |
|
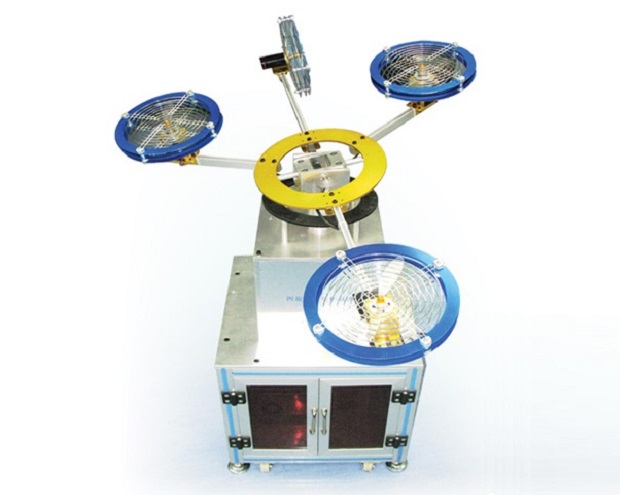
Yaw encoder |
600P/R |
|
Slip ring |
18 line |
|
Dimensions |
1000 x 1000 x 670mm |
|
Weight |
50Kg |

- Privacy Policy
-
Products
- Motion Control
- Multi-Axis Motion Control Card
- Embedded Motion Controller
- CPAC
- Automation Control IPC
- Drive Integrated Controller
- Automation Accessories
- PLC - iDEABOX
- iDEABOX Plus Intelligent Controller
- iDEABOX 3 CPU Intelligent Controller
- GDB3 Redundant PLC Intelligent Controller
- iDEABOX Pro Intelligent Controller
- Expandable Bus Controller
- Multi-function Intelligent Controller
- Accessories
- PLC Control Platform
- Servo Drive & Motor
- GSHD Series Servo Drive
- GSK Series Servo Motor
- GMXD Stepper Drive
- GT Series Stepper Driver
- I/O Module
- Handheld Tuning Panel
- Industrial Internet
- Edge Computing Services
- IIoT Cloud Platform
- IIoT Cloud Manufacturing
- Water Sensors
- Optical
- Eletrodes
- Integration devices
- Meter Transmitter
- Educational Products
- Automation Control Concept
- Mechatronics Concept
- Robot Concept
- Platforms
- About
- Support
- News & Events
- Contact Us